Step Response of a Second-Order System
File: examples/basic/01_step_response/step_response.py
What this example shows
The simplest possible Synapsys program: build a transfer function, compute its step response, and plot it. This is the "hello world" of control systems.
Theory
A transfer function represents a linear time-invariant (LTI) system in the Laplace domain:
For a second-order underdamped system, the standard form is:
| Parameter | Symbol | Effect |
|---|---|---|
| Natural frequency | Controls oscillation speed | |
| Damping ratio | Controls how fast oscillations decay |
Damping regimes:
- — underdamped: oscillates before settling
- — critically damped: fastest non-oscillating response
- — overdamped: slow, no oscillation
The step response is the output when the input switches from 0 to 1 at . It is the primary tool for characterising a system's dynamic behaviour.
System used
With the system is underdamped — it overshoots and oscillates before settling at .
Result
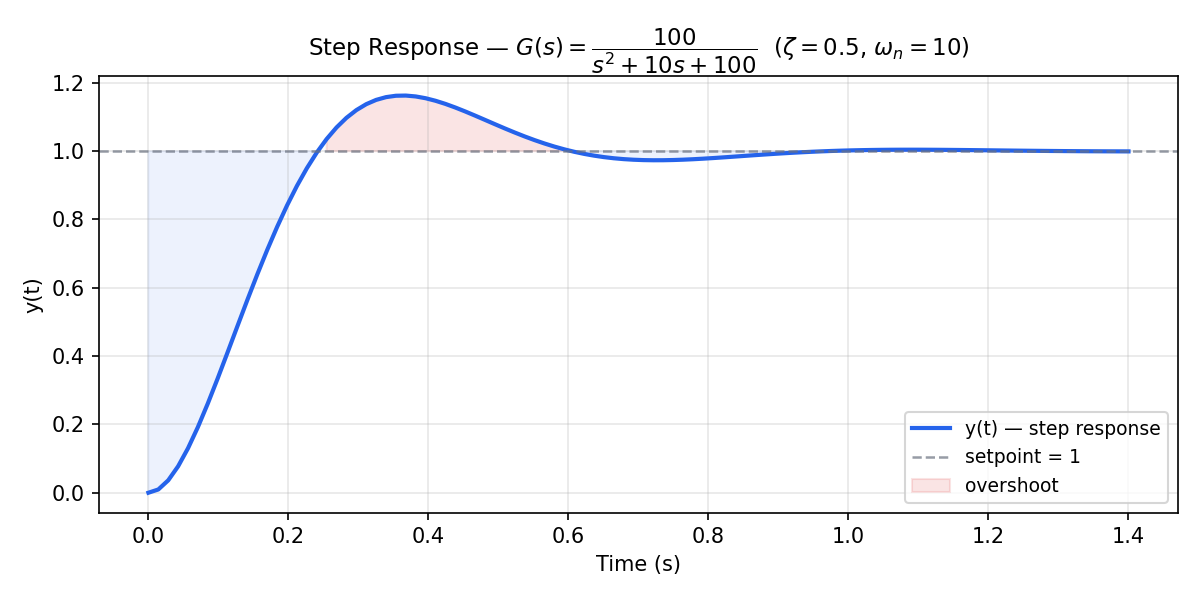
The shaded red region marks the overshoot (output exceeds the setpoint). The system settles within approximately .
Code
from synapsys.api.matlab_compat import tf, step
import matplotlib.pyplot as plt
wn, zeta = 10.0, 0.5
G = tf([wn**2], [1, 2*zeta*wn, wn**2])
print(G)
print(f"Poles : {G.poles()}")
print(f"Stable : {G.is_stable()}")
t, y = step(G)
plt.figure()
plt.plot(t, y, label="y(t)")
plt.axhline(1.0, color="k", linestyle="--", alpha=0.4, label="setpoint")
plt.title("Step Response — second-order system")
plt.xlabel("Time (s)")
plt.ylabel("y(t)")
plt.legend()
plt.grid(True)
plt.show()
Key API calls
| Call | What it does |
|---|---|
tf(num, den) | Builds a TransferFunction from coefficient lists (highest power first) |
G.poles() | Returns roots of the denominator polynomial |
G.is_stable() | True if all poles have negative real parts |
step(G) | Computes step response via scipy.signal.step; returns (t, y) |
How to run
uv run python examples/basic/01_step_response/step_response.py
Output: a plot window + step_response.png saved to the working directory.
Source
| File | Description |
|---|---|
examples/basic/01_step_response/step_response.py | Complete example — LTI analysis, PID closed-loop, step response plot |