Synapsys
Uma biblioteca Python para modelagem, análise e simulação de sistemas de controle linear. Fornece uma API compatível com MATLAB, simulação multiagente e um transporte flexível (memória compartilhada / ZMQ) para fluxos MIL → SIL → HIL.
pip install synapsysuv add synapsysuv sync --extra devVisão Geral
O Synapsys cobre toda a esteira de controle — do código de modelagem em tempo contínuo à simulação do loop fechado em tempo discreto real — com a mesma sintaxe constante.
- LTI Models
- PID / LQR
- Real-Time Simulation
- AI Integration
from synapsys.api import tf, ss, step, bode, feedback, c2d
# Transfer function: G(s) = ωn² / (s² + 2ζωnˢ + ωn²)
wn, zeta = 10.0, 0.5
G = tf([wn**2], [1, 2*zeta*wn, wn**2])
# Closed-loop (negative feedback)
T = feedback(G)
# Frequency and time-domain analysis
w, mag, phase = bode(G)
t, y = step(T)
# Zero-order-hold discretisation at 200 Hz
Gd = c2d(G, dt=0.005)
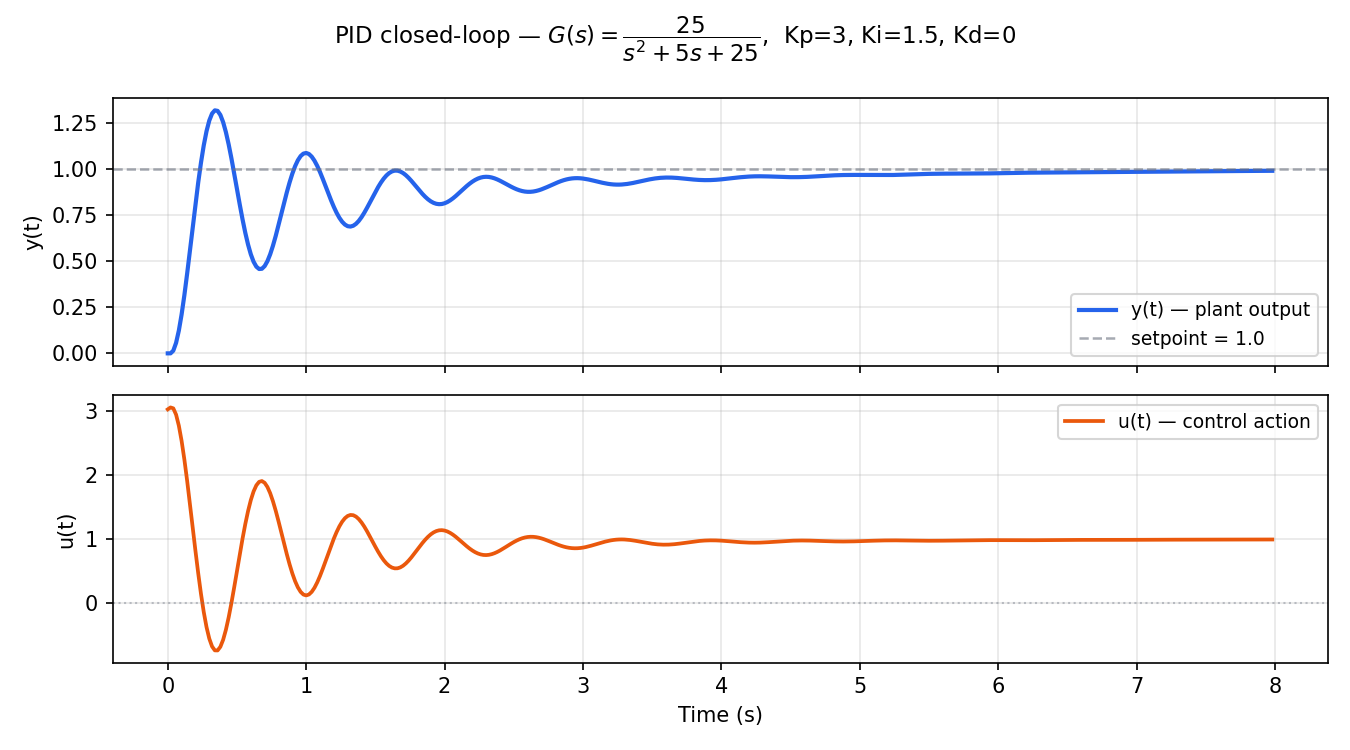
from synapsys.algorithms import PID, lqr
import numpy as np
# Discrete PID with anti-windup saturation
pid = PID(Kp=3.0, Ki=0.5, Kd=0.1, dt=0.01,
u_min=-10.0, u_max=10.0)
u = pid.compute(setpoint=5.0, measurement=y)
# LQR — solves the continuous algebraic Riccati equation
# minimises J = ∫ (x'Qx + u'Ru) dt
A = np.array([[ 0., 1.], [-wn**2, -2*zeta*wn]])
B = np.array([[0.], [wn**2]])
K, P = lqr(A, B, Q=np.eye(2), R=np.eye(1))
# Control law: u = −Kx
from synapsys.api import ss, c2d
from synapsys.agents import PlantAgent, ControllerAgent, SyncEngine, SyncMode
from synapsys.algorithms import PID
from synapsys.transport import SharedMemoryTransport
import numpy as np
# Discretise G(s) = 1/(s+1) at 100 Hz
plant_d = c2d(ss([[-1]], [[1]], [[1]], [[0]]), dt=0.01)
# Shared-memory bus — zero-copy, latency < 1 µs
with SharedMemoryTransport("demo", {"y": 1, "u": 1}, create=True) as bus:
bus.write("y", np.zeros(1)); bus.write("u", np.zeros(1))
pid = PID(Kp=4.0, Ki=1.0, dt=0.01)
law = lambda y: np.array([pid.compute(setpoint=3.0, measurement=y[0])])
sync = SyncEngine(SyncMode.WALL_CLOCK, dt=0.01)
PlantAgent("plant", plant_d, bus, sync).start(blocking=False)
ControllerAgent("ctrl", law, bus, sync).start(blocking=False)
import torch, torch.nn as nn, numpy as np
from synapsys.utils import StateEquations
from synapsys.algorithms import lqr
from synapsys.agents import ControllerAgent, SyncEngine, SyncMode
from synapsys.transport import SharedMemoryTransport
# ── 1. Build 2-DOF mass-spring-damper via named equations ──────────────────
m, c, k = 1.0, 0.1, 2.0
eqs = (
StateEquations(states=["x1", "x2", "v1", "v2"], inputs=["F"])
.eq("x1", v1=1).eq("x2", v2=1)
.eq("v1", x1=-2*k/m, x2=k/m, v1=-c/m)
.eq("v2", x1=k/m, x2=-2*k/m, v2=-c/m, F=k/m)
)
# ── 2. Compute LQR optimal gains (solves Algebraic Riccati Equation) ───────
K, _ = lqr(eqs.A, eqs.B, Q=np.diag([1., 10., .5, 1.]), R=np.eye(1))
# K = [−0.38, 2.23, 0.42, 1.75] → u* = −K·x + Nbar·r
# ── 3. MLP initialized with LQR gains (physics-informed) ────�──────────────
class NeuralLQR(nn.Module):
def __init__(self, K, Nbar):
super().__init__()
self.Nbar = Nbar
self.net = nn.Sequential(
nn.Linear(4, 32), nn.Tanh(), # hidden layers — trainable by RL
nn.Linear(32, 16), nn.Tanh(),
nn.Linear(16, 1), # output layer ← LQR gains
)
with torch.no_grad():
self.net[4].weight.data = torch.tensor(-K.reshape(1, -1))
def forward(self, x):
return self.net(x) + self.Nbar # u = MLP(x) + Nbar·r
model = NeuralLQR(K, Nbar=3.535).eval()
# ── 4. Plug into ControllerAgent — works with any nn.Module ───────────────
def control_law(state: np.ndarray) -> np.ndarray:
with torch.no_grad():
u = model(torch.tensor(state, dtype=torch.float32).unsqueeze(0))
return np.clip(u.numpy().flatten(), -20.0, 20.0)
transport = SharedMemoryTransport("sil_2dof", {"state": 4, "u": 1}, create=False)
agent = ControllerAgent("neural_lqr", control_law, transport,
SyncEngine(SyncMode.WALL_CLOCK, dt=0.01))
agent.start(blocking=True) # or blocking=False for real-time plot
Escada de Fidelidade de Simulação
O Synapsys foi projetado para testes de incremento de fidelidade. Como apenas a camada de transmissão de processos se altera, o algoritmo de controle centraliza-se o mesmo.
Veja o guia HIL / SIL para um exemplo detalhado de migração passo a passo.
Integração Inteligente IA + Controle
O Synapsys é construído para fluxos de pesquisa modernos. Qualquer modelo PyTorch, JAX ou scikit-learn pode ser pareado diretamente a um ControllerAgent por meio de um callback de tipo np.ndarray → np.ndarray — permitindo rodar redes baseadas em física e R.L. em tempo real nos loops HIL/SIL.
PyVista 3D window (50 Hz) — drone mesh, trajectory trail, reference curve and live HUD.
matplotlib telemetry (10 Hz) — x-y position, altitude, Euler angles and control deviations δu.
Walkthrough completo: Exemplo SIL + Neural-LQR →
3D Simulation Views
Janelas de simulação 3D prontas para usar — conecte qualquer controlador (LQR, PID, rede neural, agente RL) com uma única linha de código.
x = [x, ẋ, θ, θ̇]Pêndulo invertido sobre carrinho. 4 estados, instável — clássico para LQR e RL.
x = [θ, θ̇]Pêndulo de 1 elo com base fixa. O sistema instável mais simples para testar qualquer controlador.
x = [q, q̇]Massa-mola-amortecedor com rastreamento de setpoint. LQR com feed-forward de posição.
Passe qualquer callable como controlador — LQR, PID, rede neural ou agente RL: CartPoleView(controller=my_model).run() · Ver exemplos →
Do Blog
Artigos de pesquisa aprofundados e posts práticos sobre controle de sistemas, IA e Synapsys.
PID with Anti-Windup: Theory, Tuning and Experimental Validation
A research-oriented deep-dive into discrete PID with back-calculation anti-windup — from the integral windup problem to experimental step-response validation, with Synapsys code throughout.
Ler artigo completo →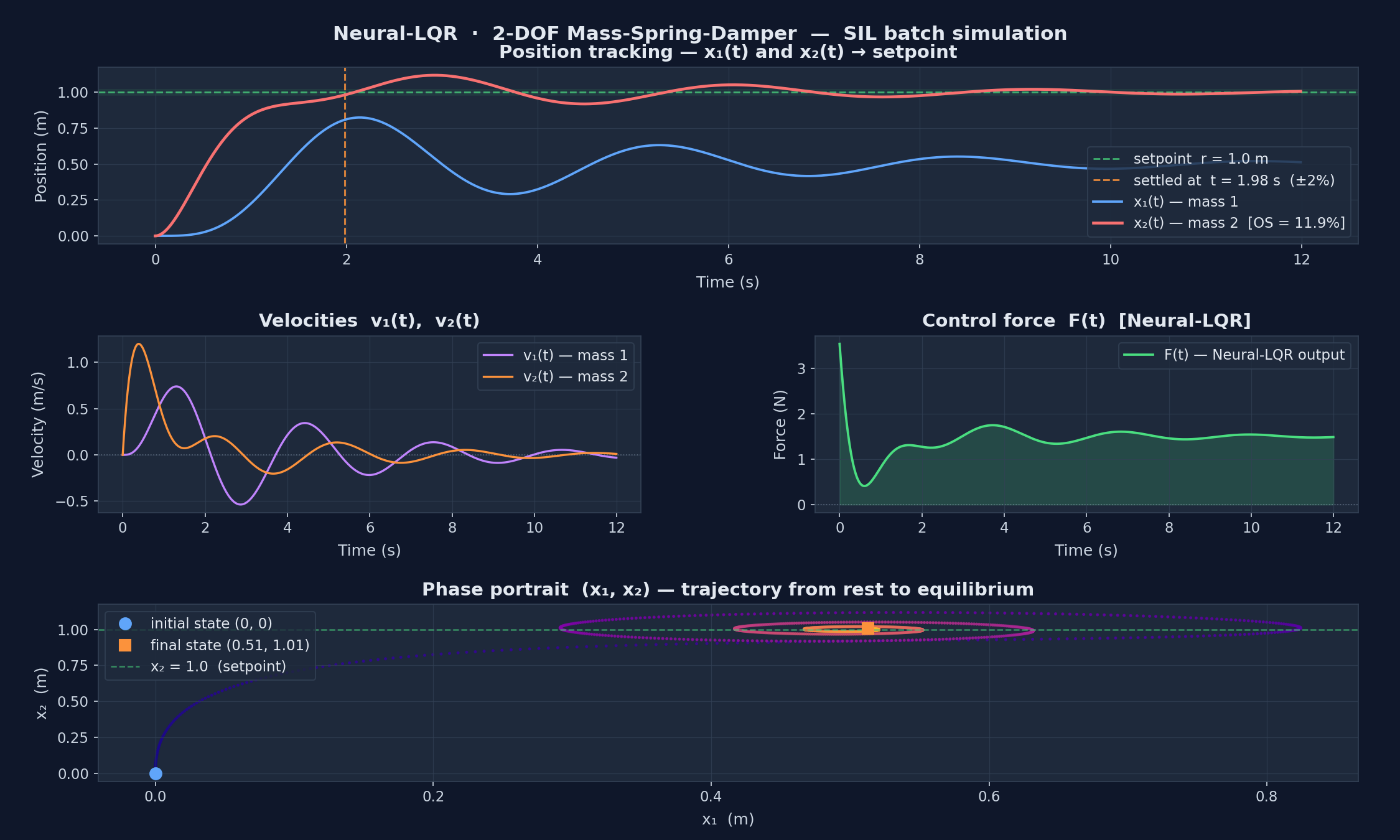
From Model to Hardware: MIL → SIL → HIL in Three Steps
A practical guide to the MIL/SIL/HIL development workflow with Synapsys — swap from simulation to real hardware by changing one line, keeping your control algorithm untouched.
Ler artigo completo →PID with Anti-Windup: Theory, Tuning and Experimental Validation
A research-oriented deep-dive into discrete PID with back-calculation anti-windup — from the integral windup problem to experimental step-response validation, with Synapsys code throughout.
Ler artigo completo →Mapa Completo da Biblioteca
Nove pacotes focados — da matemática LTI ao hardware em tempo real. Clique em qualquer card para ir à referência da API.
MATLAB-Compatible API
Familiar entry point — mirrors the MATLAB Control Toolbox interface.
Core LTI Systems
Mathematical backbone — transfer functions, state-space and MIMO matrices.
Control Algorithms
Discrete PID with anti-windup and LQR via the Algebraic Riccati Equation.
Multi-Agent Simulation
Lifecycle agents for real-time closed-loop simulation with lock-step or wall-clock sync.
Message Broker
High-level pub/sub bus decoupled from the transport layer — shared memory or ZMQ backend.
Transport Layer
Zero-copy IPC and networked PUB/SUB for distributed MIL → SIL → HIL workflows.
Utilities
Matrix builders and declarative state-equation DSL for clean model definitions.
Hardware Interface
Abstract interface for FPGA, FPAA and microcontroller backends — planned for v0.5.
State Observers
Kalman filter and Luenberger observer for state estimation — planned for v0.3.
Resumo dos Pacotes
| Pacote | Conteúdo | Status |
|---|---|---|
synapsys.core | Função de Transferência, Espaço de Estados, discretização ZOH | Estável |
synapsys.api | Camada compatível com MATLAB: tf(), ss(), step(), bode() | Estável |
synapsys.algorithms | PID discreto com anti-windup, LQR (resolve ARE) | Estável |
synapsys.agents | PlantAgent, ControllerAgent, SyncEngine | Funcional |
synapsys.transport | Memória Compartilhada (zero-copy), ZMQ PUB/SUB & REQ/REP | Funcional |
synapsys.viz | 3D sim views plug-and-play: CartPoleView, PendulumView, MassSpringDamperView | Funcional |
synapsys.hw | HardwareInterface, MockHardwareInterface (HIL) | Interface |
synapsys.mpc | Controle Preditivo Baseado em Modelo (MPC) | Planejado |